An electronics plate is mounted along the elongated axis, and on this plate the battery, encoder, transmitter and sensors are mounted.
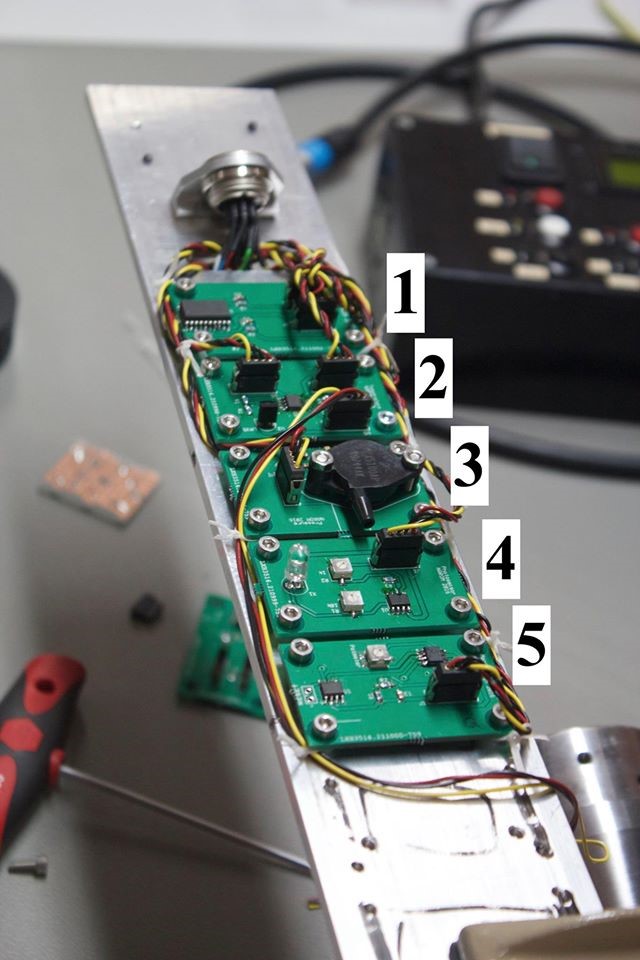
Figure 1 shows some of the sensors mounted on the old student rocket plate. A basic sensor kit is always flown on the rockets:
- two-axis accelerometer
- two temperature sensors
- pressure sensor
- light sensor
- two-axis magnetometer
- GPS
- IMU
- Temperature array, with the sensors mounted along the nosecone to measure the temperature gradient
On the Mongoose rocket there is usually space available for additional sensors. Some of the sensors are analog and some are digital.
The encoder is the brain of the rocket. It is mounted with the transmitter on the other side of the electronics plate compared to the sensors. The encoder samples the analog sensors and also supports two parallel 8-bit digital inputs. The encoder gathers the samples and outputs them in a signal which is Manchester code bi-phase modulated. This means that the signal carries the data and clock in one signal. By doing this data rate drops to half compared to when only the data is carried. One reason to use Manchester code is to make it much easier for the ground station to lock onto the signal after a dropout.
From the encoder, the signal is sent to the transmitter board. The frequency used in the student rocket is 2279.5 MHz with a transmitted power of 450 mW. The transmitter uses frequency modulation.
<< Previous page – Content – Next page >>
This article is part of a pre-course program used by Andøya Space Education in Fly a Rocket! and similar programs.